Read chapter 1, bill of materials, and make sure you have everything you need to get started.
Read the overview section to learn some details and techniques for building your robot.
Read chapter 2 and follow the detailed, simple-to-follow steps in assembling your robot.
Download the Teensy Control Board firmware here.
Download the robot control software for your PC here.
Read chapter 7 and watch this video on loading the software.

Developed by Chris Annin & Yifei Cheng.
ROS 2 driver for the AR4 6-DOF robot arm.
Tested with ROS 2 Jazzy on Ubuntu 24.04.
Supports:
Features:
Developed by Ekumen Labs
Unlock the full potential of your AR4 Robot with this comprehensive, open-source ROS 2 software stack. This package provides everything you need to control the AR4 robot and run high-fidelity simulations in leading environments like Gazebo, NVIDIA Isaac Sim, and MuJoCo.
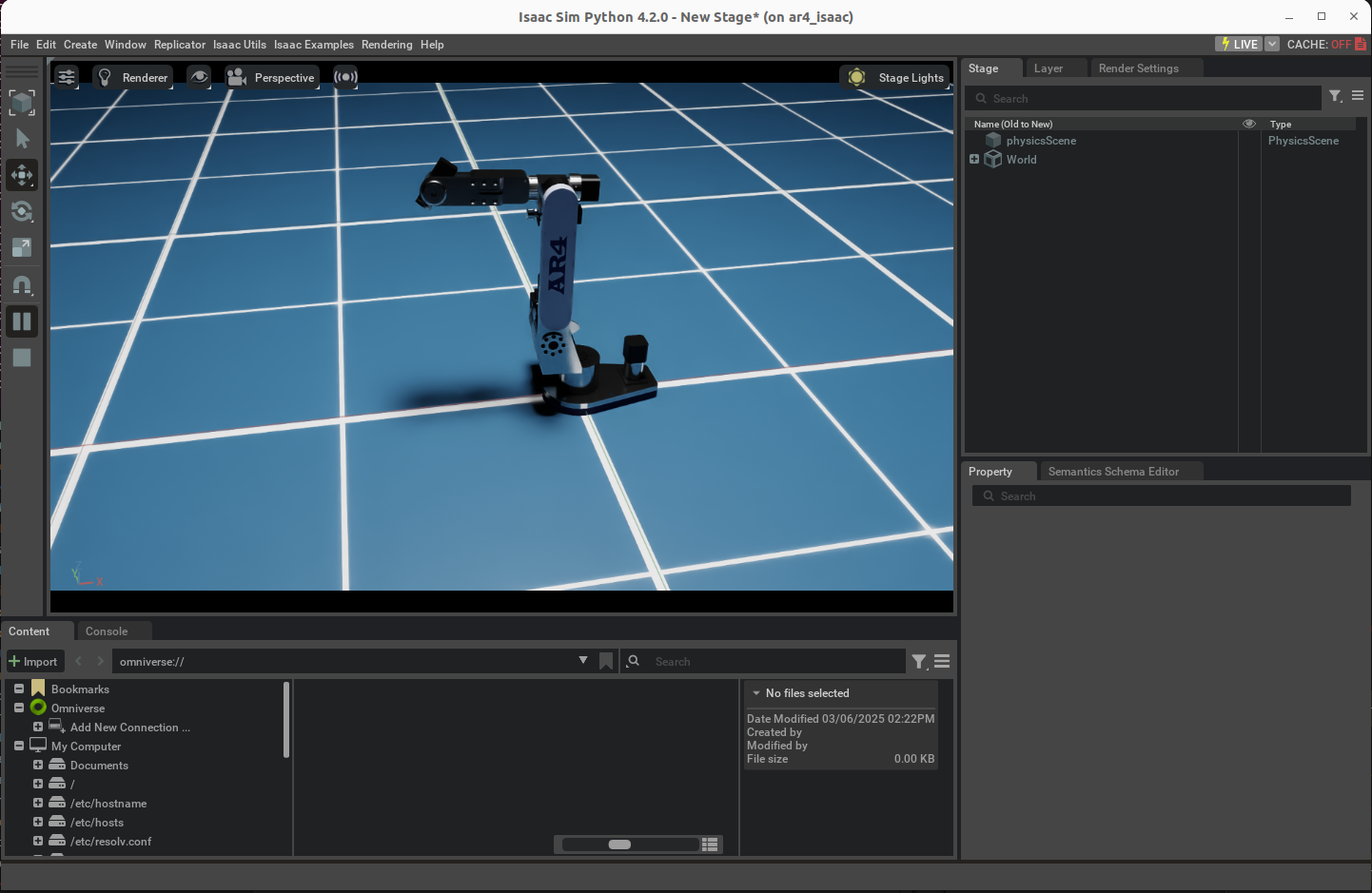
(Note: The Isaac Sim bringup package is currently under active development.)
Accelerate your AR4 development cycle with photorealistic simulation and AI-powered perception using NVIDIA Isaac Sim. This ROS 2 package, developed by Ekumen, includes a dedicated bringup configuration for Isaac Sim, allowing you to train and test reinforcement learning models, computer vision algorithms, and complex tasks in a physically accurate virtual world.
Launch in a Single Command: Use the provided Docker image to start a simulated AR4 instance in Isaac Sim quickly.
Leverage NVIDIA Omniverse: Benefit from the powerful Omniverse platform for building scalable, physically accurate simulations.
Ideal for AI Workloads: Perfect for developing and testing pick-and-place, assembly, and other automation tasks powered by AI.