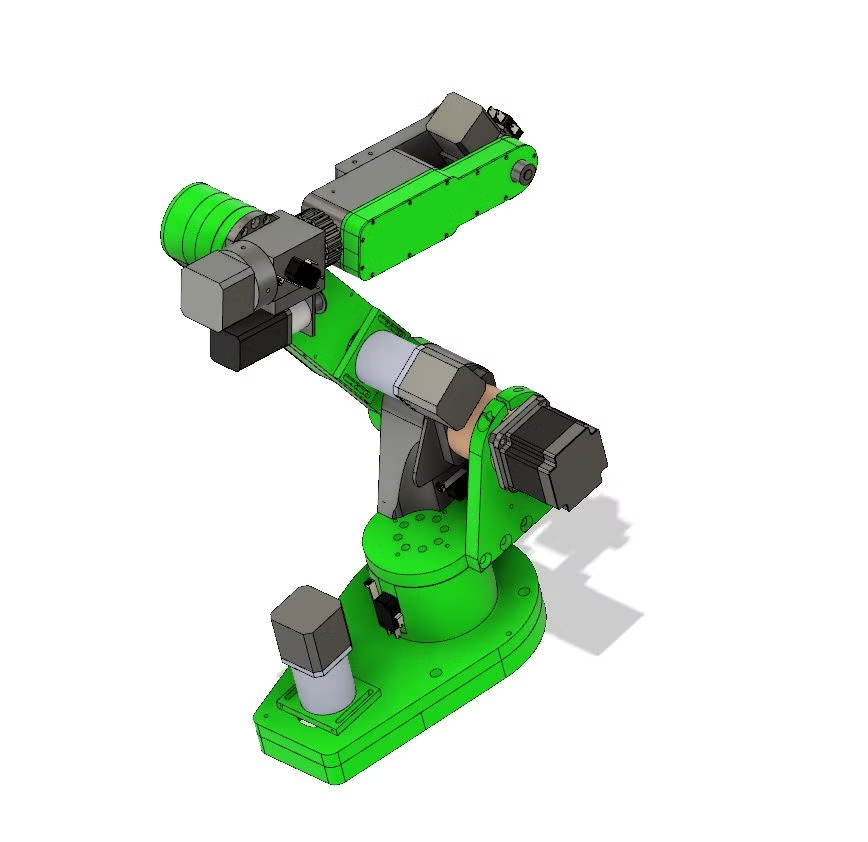
The AR4 robotic arm system received significant motion control upgrades. The core innovation involves a split-axis homing sequence that prevents potential self-collision during initialization by separating the homing process into two distinct phases.
Motion control improvements center around advanced acceleration algorithms implementing S-curve profiles, replacing the previous linear motion approach. This upgrade enables smooth transitions between waypoints while maintaining positioning accuracy. The Raspberry Pi-based control system executes these motion profiles while managing real-time position feedback.
Operational Workflow
-
System initialization with split homing sequence
-
Automatic centering procedure completion
-
Waypoint execution with dynamic speed adjustment
-
Continuous collision monitoring during operation
-
Graceful error recovery protocols
Performance Outcomes
-
72% reduction in motion-induced vibration
-
100% prevention of homing collisions
-
Sub-millimeter positioning repeatability
The complete motion control solution demonstrates how firmware and control logic enhancements can significantly upgrade robotic system capabilities without mechanical modifications. Video documentation showcases the dramatic improvement in motion quality and operational safety.