For now doing educational things
Starting for programing some special moves.
This

This
The project was born from a vision by Suebpong and the Majortech team to push the limits of mobile robotics. While stationary arms are common, the goal was to give a powerful robot arm true “legs”, or in this case, tracks, to go where the work is. Inspired by the need for versatile automation in Smart Agriculture and the high-stakes demands of Search and Rescue (SAR), they set out to mate the powerful 6-axis AR4 robot by Annin Robotics with the Terrex (TR-80) tank chassis.
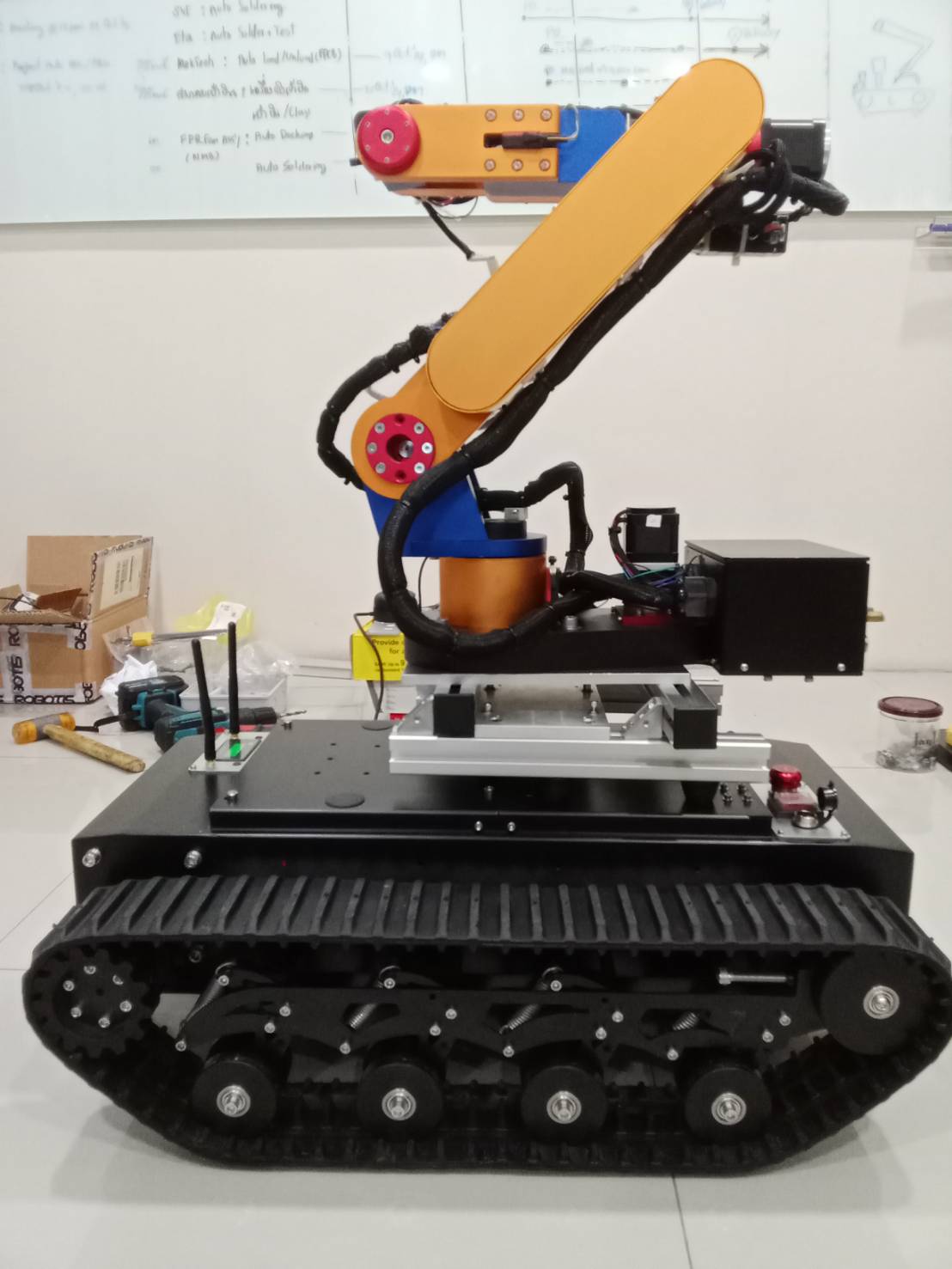
The first major hurdle was physics. Mounting a dynamic 6-axis arm onto a moving platform creates a complex dance of forces. The initial prototype, with its 40 kg payload, served as the testbed. The team spent weeks evaluating weight distribution and chassis stability during movement. Watching the TR-80 traverse obstacles and uneven terrain with the AR4 mounted proved the chassis could provide the rugged mobility required.
Deployment: The Terrex TR-80 chassis navigates autonomously or via remote to a designated GPS coordinate in a field or disaster site.
Stabilization: The platform assesses its stability and engages any necessary suspension locks to create a rigid base for the arm.
Mission Selection: The control system selects the appropriate tool for the task (e.g., harvesting gripper).
Precision Operation: The AR4 arm executes its programmed routine—for example, identifying a crop, calculating the optimal picking angle, and gently harvesting it.
Material Handling: The harvested item is placed into an onboard storage bin. If it were a tactical inspection, the EOAT would switch to a sensor suite to scan for hazards.
Relocation: Once the task at the current location is complete, the AR4 arm folds into its secure travel position, and the Terrex chassis drives to the next waypoint.
